A*算法 A*算法是什么 原理
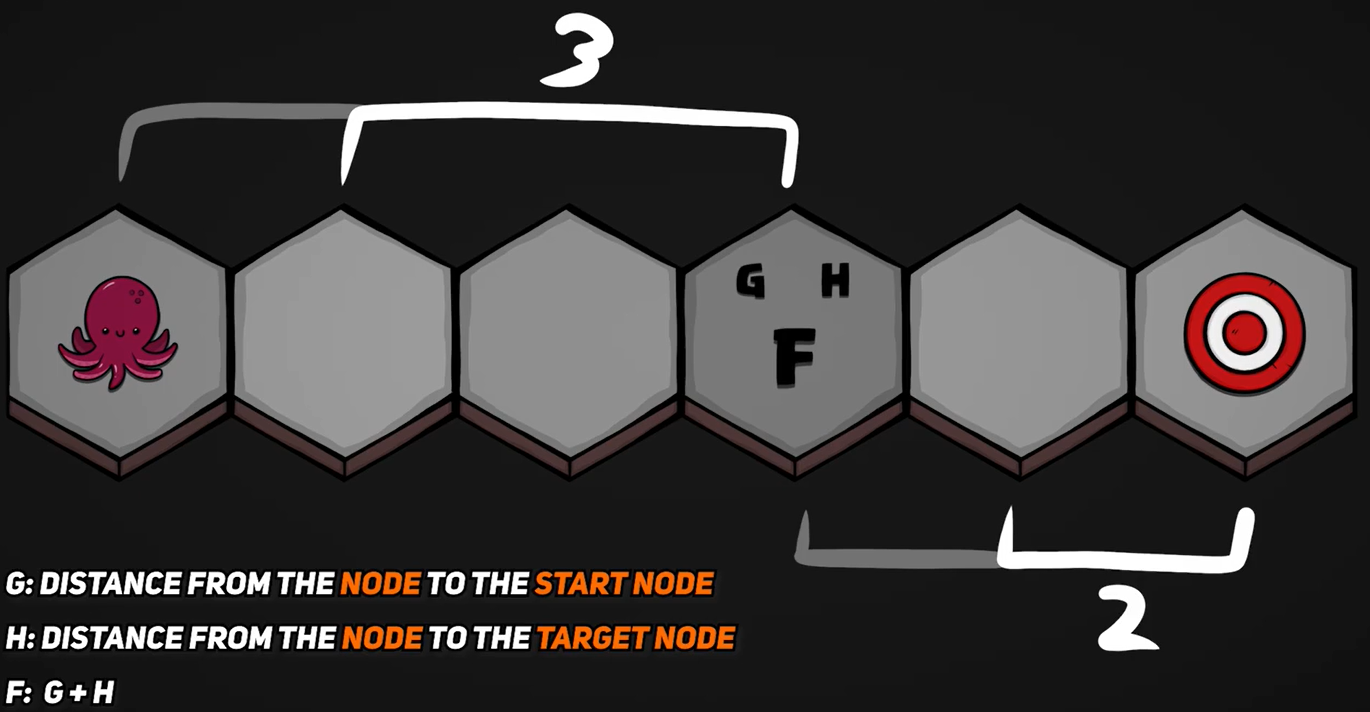
主要利用到3个数值,
G Cost :从出发点到该点已花费的距离。
H Cost :从该点到终点的最乐观距离(不考虑障碍等因素)。
F Cost = G Cost + H Cost ,它越低,作为寻径选择就越有吸引力。
目标是简单选择最低的F Cost,一步一步往后踩,每一步都记录附近没踩过的格子的F Cost到列表里。每踩下去一步后,如果发现周围邻近的格子F Cost都比过去的某个列表里的格子的F Cost大,就用那个列表里的格子继续踩。
不断重复,直到我们到达目标节点。
NodeBase
1 2 3 4 5 6 7 8 9 10 11 12 13 public class Nodebase { public float G { get ; private set ; } public float H { get ; private set ; } public float F => G+H public Nodebase Connection { get ; private set } public List<NodeBase> Neighbors { get ; protected set ; } public void Setconnection (Nodebase nodebase ) public float GetDistance (NodeBase other ) public void SetG (float gg public void SetH (float h => H=h;}
算法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 public static List<NodeBase> FindPath (NodeBase startNode, NodeBase targetNode ){ var toSearch = new List<NodeBase>() { startNode }; var processed = new List<NodeBase>(); while (toSearch.Any()) { var current = toSearch[0 ]; foreach (var t in toSearch) { if (t.F < current.F || t.F == current.F && t.H < current.H) current = t; } processed.Add(current); toSearch.Remove(current); current.SetColor(ClosedColor); if (current == targetNode) { var currentPathTile = targetNode; var path = new List<NodeBase>(); var count = 100 ; while (currentPathTile != startNode) { path.Add(currentPathTile); currentPathTile = currentPathTile.Connection; count--; if (count < 0 ) throw new Exception(); Debug.Log("sdfsdf" ); } foreach (var tile in path) tile.SetColor(PathColor); startNode.SetColor(PathColor); Debug.Log(path.Count); return path; } foreach (var neighbor in current.Neighbors.Where(t => t.Walkable && !processed.Contains(t))) { var inSearch = toSearch.Contains(neighbor); var costToNeighbor = current.G + current.GetDistance(neighbor); if (!inSearch || costToNeighbor < neighbor.G) { neighbor.SetG(costToNeighbor); neighbor.SetConnection(current); if (!inSearch) { neighbor.SetH(neighbor.GetDistance(targetNode)); toSearch.Add(neighbor); neighbor.SetColor(OpenColor); } } } } return null ; } public override void CacheNeighbors ( Neighbors = GridManager.Instance.Tiles.Where(t => Coords.GetDistance(t.Value.Coords) == 1 ).Select(t=>t.Value).ToList(); }
思考
GetDistance是优化的重点,想减少噪音,如何根据具体业务选择最好的算法是值得思考的。
算法核心就是上面代码的3.这一块:每走一步当前最优时需要更新所有的未探索邻居结点,从中找出更优解作为继续探索的起点。
多种寻路对比 方格版本 1.先做一个地图生成器,每个方格都带坐标,提前生成好地图和每个结点的邻居list;
2.规定横竖都是1长度,斜向是1.4长度(1/cos45°);
3.有2个列表,一个是【已探索的结点】列表,一个是【即将探索的结点】队列。每一步探索,就是去遍历第二个队列,把里面的结点移到第一个列表里,同时把这个结点的邻居list全部扔到第二个队列里(如果已经在第一个、第二个列表中有,就不扔)。// 这一步是优化点
可以优化的寻路算法 1.宽度优先算法:这个是最简单直白的版本,总体是绕圈方式一点点遍历全图,个体之间是找找到可达就确定一个路径,不进行任何大小比较。这种寻路算法并没有什么意义,效率低且无法找到最短路径 ,找到的第一个解不一定是最短距离。
2.迪杰斯特拉算法:基于宽度优先算法,总体是绕圈方式,但是个体之间不再是可达就确定,而是不停更新比较、更新成最小值。可以找到最短路径,但是计算量极大 ,因为需要遍历完整个地图结点才能确定出最短解,不然。
3.贪心算法:追求局部最优解,总体是几乎直线的形式。但是因为走的是局部最优,获得的解在有障碍物的情况下不一定是最优解。速度极快,只能用于中途无障碍的寻路 ,比如mmo广场。
4.A星算法:结合迪杰斯特拉往后看、贪心往前看,一种综合评估的算法。也会和贪心算法一样选错路,但是很快会调转回头,最终一定能得到一个最短解 。
引入优先队列优化 通过引入优先队列,可以解决迪杰斯特拉算法 因为无法确定退出时间点,所以需要遍历完全图才能确定获得最短解,导致效率低下的问题。
迪杰斯特拉算法 :具体引入就是修改【即将探索的结点】队列,对于每一个priority = 到当前点的最短距离 G Cost,优先去探索最小的sumDistance的点,这样第一个找到的路径就是最短路径。
贪心算法 :把上面的priority改为priority = 当前点的乐观最短距离 H Cost。不过这不一定能得到最短解。
A星算法 :把上面的priority改为priority = 到当前点的最短距离 G Cost + 当前点的乐观最短距离 H Cost。一定能找到最短解,且性能适中。